Un nuevo sensor podría hacer mucho más hábiles a los robots en tareas manuales
ROBÓTICA.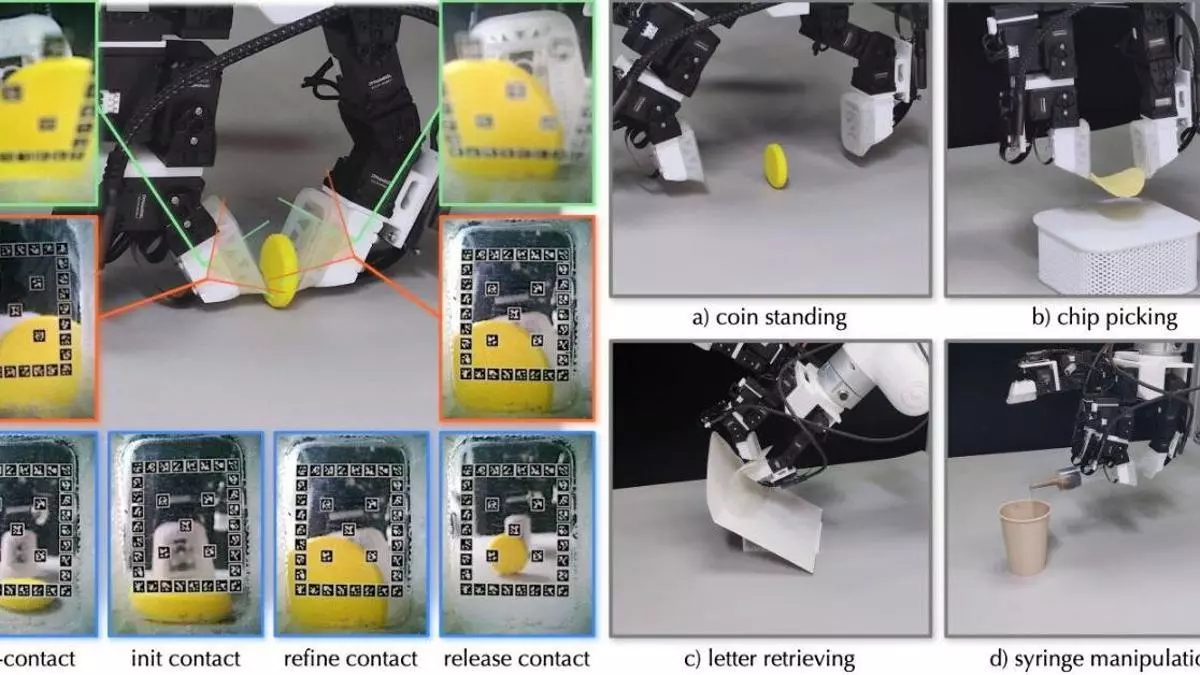
El nuevo sistema combina visión y tacto en tiempo real para que los robots puedan agarrar, ajustar y manipular objetos con mucha más precisión.
FingerEye: un nuevo sensor que acerca a los robots a la destreza manual humana. / Crédito: Xu et al.
La robótica avanza hacia una nueva etapa con FingerEye, un sensor que promete dotar a los robots de mayor precisión y adaptabilidad en tareas delicadas. Su principal novedad es que integra visión y tacto de forma continua, algo que puede marcar diferencias en operaciones que requieren alta destreza.
Un sensor que recopila un flujo continuo de información visual y táctil de seres humanos podría mejorar la adaptabilidad y la capacidad de respuesta de los robots, permitiéndoles abordar tareas de manipulación más complejas. Así lo indica un estudio publicado en arXiv, realizado por investigadores de la Universidad Nacional de Singapur y la firma RoboScience.
La realidad indica que la robótica lleva años avanzando en tareas repetitivas, pero sigue tropezando cuando la manipulación exige precisión fina, adaptación y “sentido del tacto”, algo que parece una exclusividad del ser humano. Para resolver este problema, FingerEye integra visión y tacto en una misma arquitectura, buscando que los robots no solo detecten objetos antes del contacto, sino también que ajusten su agarre mientras interactúan con ellos.
Información integrada en tiempo real.
La idea principal gira en torno a combinar dos tipos de información que hoy suelen llegar por separado: dos cámaras RGB binoculares, que brindan percepción de corto alcance y una estimación implícita de profundidad, y un anillo flexible que se deforma cuando el robot toca un objeto, según indica TechXplore.
Esa deformación se interpreta mediante una "estimación de pose", basada en marcadores para inferir fuerzas y torques de contacto, una señal útil para controlar la manipulación con mayor precisión. El diseño permite una transición continua entre la fase previa al contacto y la fase táctil, en lugar de depender de sensores que “despiertan” solo después de tocar algo.
El cambio de paradigma es importante porque gran parte de la destreza humana depende justamente de aquello que ocurre antes del contacto. Para tomar un objeto frágil, enderezar una moneda de canto o introducir una aguja en un entorno estrecho, no basta con “agarrar”: hay que anticipar, corregir y volver a corregir en milésimas de segundo para tener éxito.
Superando los escollos para la automatización en ciertos escenarios.
Los sensores táctiles actuales para robótica suelen ofrecer retroalimentación únicamente después del contacto, limitando la capacidad del robot para iniciar la interacción con precisión. FingerEye intenta cerrar esa brecha con una percepción continua: en ese punto estaría su principal aporte.
Sobre esta base, el equipo desarrolló una "política de imitación visual-táctil" que fusiona señales de múltiples sensores para aprender comportamientos de manipulación con pocos datos reales. Esto permite que las estimaciones de los robots sean más exactas frente a variaciones en la apariencia de los objetos.
En pruebas de laboratorio y simulación, el sistema fue evaluado en tareas que exigen distintos tipos de destreza: además, el sensor es compacto, de bajo coste y de código abierto, una característica importante para mejorar el sistema o adaptarlo a nuevos escenarios. Entre las aplicaciones posibles, los autores destacan hogares, hospitales, servicios e industria, espacios donde la manipulación precisa sigue siendo uno de los grandes cuellos de botella de la automatización.
Por: Pablo Javier Piacente / T21.
Sitio Fuente: Levante / Tendencias21